Tangan Robot Multifungsi – Perkembangan teknologi robotika terus menunjukkan kemajuan signifikan, khususnya dalam upaya meniru dan melampaui kemampuan anggota tubuh manusia. Salah satu fokus utama dalam bidang ini adalah pengembangan sistem manipulasi yang menyerupai tangan manusia, karena tangan merupakan alat utama manusia dalam berinteraksi dengan lingkungan. Inovasi terbaru menunjukkan bahwa pendekatan desain yang tidak sepenuhnya meniru anatomi manusia justru dapat menghasilkan kemampuan yang lebih fleksibel dan unggul dalam konteks tertentu.
Penelitian terkini di bidang robotika memperkenalkan sebuah perangkat robotik berbentuk tangan dengan karakteristik unik yang mampu melakukan berbagai fungsi manipulasi dan pergerakan. Perangkat ini di rancang untuk menggabungkan kemampuan menggenggam dan mobilitas, sehingga membuka peluang baru dalam penerapan robot di berbagai sektor, termasuk industri, layanan, dan eksplorasi lingkungan ekstrem.
Desain Tangan Robot dengan Struktur Fleksibel dan Multifungsi
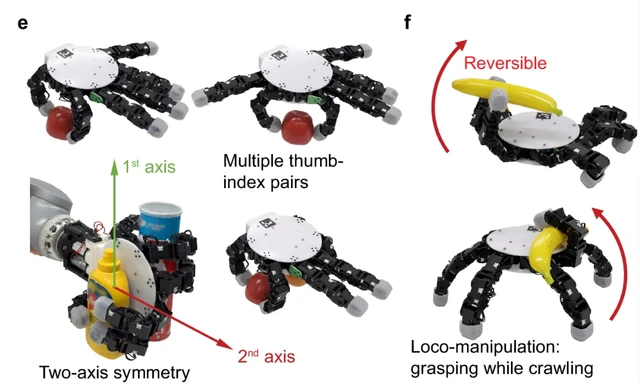
Perangkat robotik ini dikembangkan dengan struktur utama berupa telapak berukuran kompak yang di lengkapi sejumlah jari fleksibel berbahan silikon. Konfigurasi jari yang dapat di sesuaikan memungkinkan robot melakukan berbagai variasi gerakan menggenggam dan menahan objek. Tidak seperti tangan manusia yang memiliki keterbatasan orientasi, tangan robot ini di rancang agar mampu mencengkeram dari berbagai sisi telapak, sehingga meningkatkan stabilitas dan kekuatan genggaman.
Pendekatan modular pada desain jari memberikan fleksibilitas tambahan, di mana jumlah jari dapat di tambah sesuai kebutuhan. Sehingga hal ini memungkinkan robot untuk menangani lebih dari satu objek secara bersamaan tanpa mengurangi efisiensi cengkeraman. Fleksibilitas struktur ini menjadikan tangan robot lebih adaptif di bandingkan tangan manusia dalam konteks manipulasi mekanis.
Kemampuan Loco-Manipulation sebagai Pendekatan Baru Robotika
Salah satu aspek paling inovatif dari perangkat ini adalah kemampuannya untuk melakukan loco-manipulation. Yaitu kombinasi antara pergerakan dan manipulasi objek dalam satu sistem terintegrasi. Tangan robot tidak hanya berfungsi sebagai alat genggam, tetapi juga mampu bergerak secara mandiri dengan memanfaatkan jari-jarinya sebagai alat locomotion.
Kemampuan ini memungkinkan perangkat berpindah tempat di berbagai permukaan sambil tetap membawa atau mengambil objek. Pendekatan tersebut memberikan efisiensi tinggi dalam situasi di mana ruang terbatas atau medan sulit di jangkau oleh robot konvensional. Integrasi fungsi ini menunjukkan bahwa pemisahan antara sistem gerak dan sistem manipulasi tidak lagi menjadi keharusan dalam desain robot modern.
Robot tangan canggih yang bisa lepan dari lengan lalu berjalan seperti laba-laba.
Inspirasi Biologis dalam Pengembangan Sistem Robotik
Desain tangan robot ini tidak lepas dari inspirasi yang berasal dari alam. Banyak organisme hidup memiliki anggota tubuh multifungsi yang mampu beradaptasi dengan berbagai kebutuhan lingkungan. Hewan seperti gurita dan serangga tertentu menunjukkan bahwa fleksibilitas struktur tubuh dapat meningkatkan kemampuan bertahan hidup dan efisiensi gerak.
Pendekatan biomimetik ini menjadi dasar penting dalam pengembangan robot. Karena memungkinkan perancang untuk menciptakan sistem yang lebih adaptif dan serbaguna. Dengan meniru prinsip fungsional dari makhluk hidup, robot dapat di kembangkan tidak hanya untuk tugas spesifik, tetapi juga untuk menghadapi kondisi yang dinamis dan tidak terduga.
Potensi Aplikasi dan Pengembangan Teknologi di Masa Depan
Teknologi tangan robot multifungsi ini memiliki potensi besar untuk di terapkan dalam berbagai bidang. Dalam sektor industri, perangkat ini dapat di gunakan untuk tugas perakitan kompleks, penanganan material, dan lingkungan kerja yang membutuhkan presisi tinggi. Di bidang layanan, robot dengan kemampuan manipulasi dan mobilitas dapat membantu pekerjaan yang berisiko bagi manusia.
Selain itu, desain ini juga membuka peluang pengembangan prostetik generasi baru. Struktur simetris dan kemampuan adaptif dari tangan robot memungkinkan pengguna memperoleh fungsi tambahan yang melampaui kemampuan biologis manusia. Sehingga penelitian mengenai adaptasi otak manusia terhadap anggota tubuh buatan menunjukkan bahwa sistem saraf memiliki fleksibilitas tinggi untuk mengintegrasikan konfigurasi nonkonvensional.
Dengan terus berkembangnya riset di bidang ini, pendekatan desain robot yang menggabungkan fleksibilitas, modularitas, dan inspirasi biologis. Di perkirakan akan menjadi fondasi penting bagi generasi robot masa depan.









{kind=link}